Projects
Emulated Depth Sensors
Simulating a Robotic Harvester
Simulating a Robotic Harvester

Implemented online rendering of depth for emulated lidar and RGB-D sensors.
Simulating a Robotic Harvester
Simulating a Robotic Harvester
Simulating a Robotic Harvester

Developed advanced simulations to optimize performance and accuracy for robotic harvester systems in unstructured environments.
Modeling a Harvest Aid
Simulating a Robotic Harvester
Modeling a Harvest Aid

Sub-projects for my Master's Thesis: developing a 'Digital Twin' model of a harvest aid robot and translating field data into simulated grapevine rows.
Smooth Path Planner
Nursery Automation Project
Modeling a Harvest Aid

Main focus of my Master's Thesis: developing two path-planning algorithms for a non-holonomic mobile robot and comparing their efficacy in an agricultural setting.
Cislunar Explorers
Nursery Automation Project
Nursery Automation Project

Aerospace research project studying orbital mechanics, optimal flight path trajectories, green rocket fuels and novel navigational paradigms.
Nursery Automation Project
Nursery Automation Project
Nursery Automation Project

Simulated study of a orchard nursery robot designed to traverse a field and estimate the sizes of trees.
Computer Vision Project
Automated Orchard Platform
Computer Vision Project

Several machine vision projects completed for ECS 174 - Computer Vision
Fiberizer
Automated Orchard Platform
Computer Vision Project
.jpg/:/rs=w:388,h:194,cg:true,m/cr=w:388,h:194)
Fashion waste research project designing and assembling a machine to reuse and up-cycle fabric scraps.
Automated Orchard Platform
Automated Orchard Platform
Automated Orchard Platform

Agricultural engineering research project designing installing and testing a motor controller to automate an apple picking platform.
Water Pump Project
Scanning Laser Microscope
Automated Orchard Platform

Course project designing, fabricating and competing with a high efficiency water pump.
Open Design Project
Scanning Laser Microscope
Scanning Laser Microscope

Course project exploring entrepreneurship and rapid prototyping in mechanical engineering.
Scanning Laser Microscope
Scanning Laser Microscope
Scanning Laser Microscope

Course project assembling and operating a scanning laser microscope, with emphasis on engineering communication and reporting.
Emulating Depth Sensors

Simulating Depth
I implemented online rendering of depth data for emulated LiDAR and RGB-D sensors within Unity. This process involved leveraging a compute shader to efficiently perform depth rendering directly on the GPU, ensuring high-performance data processing. I converted depth information from camera space into XYZ coordinates in global space to enable accurate spatial mapping.

Safety and Development
The rendered depth data was used to simulate the physical output of the robotic harvester's sensors in a virtual environment, providing a realistic testbed for validating the LiDAR and drive systems. This was integral to ensuring system safety and optimizing sensor-driven functionalities
Simulating a Robotic Harvester
Creating a Robotics Simulator
The simulation project focused on creating a realistic, dynamic environment to model the robotic harvester's interactions with unstructured agricultural settings. I developed frameworks to replicate sensor feedback and environmental variability. The simulation enabled extensive testing of control algorithms and decision-making logic.

Integrated Testing
To streamline development and accelerate testing cycles, I integrated the sim with automated pipelines using Jenkins. This setup allowed for continuous integration and testing of control algorithms and system updates within the simulated environment. Developers could quickly identify and address issues, validate changes, and ensure robustness without relying on physical hardware.
Modeling a Harvest Aid Robot
Creating a Dynamics Model
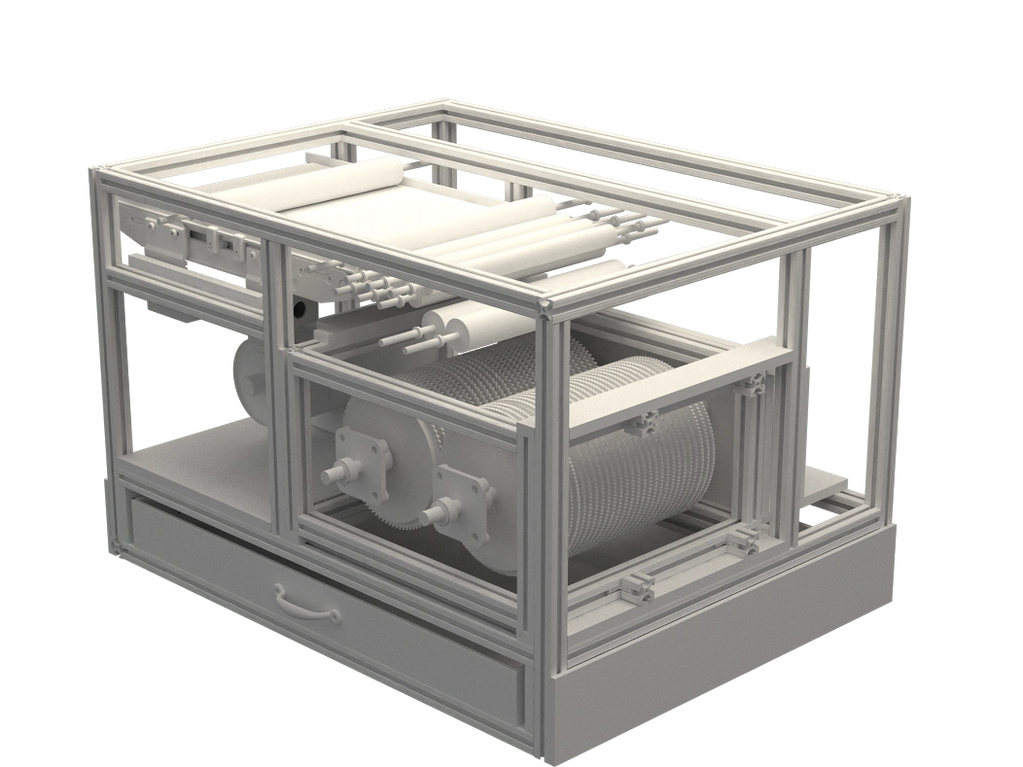
In this project I developed a dynamic model of a robot we built in our lab and combined this with a biological model to create a full environment for testing and validation of robotic systems.
From a CAD file, I generated a URDF that represented the robot. At the same time, I worked with GPS data and a biological model of a grapevine to generate a simulated orchard.

ROS and Gazebo
Using ROS and Python, I combined the robot description and orchard model. I worked with the ROS-Control structure and Gazebo plugins to generate the model which acts as a 'digital twin' of the physical robot in our lab.
Complete with collision detection, simulated odometry and GPS data, dynamic effects, and visualization functions this is an invaluable tool for robotics research.
Smooth Curvature Path Planners

Smooth and Differentiable
For my Master's Thesis I chose to work with Path Planning algorithms for non-holonomic robots.
I wanted to improve on present solutions by creating paths with continuous and differentiable curvature that not only respected constraints on maximum curvature, but also on first and second rate of curvature change.
OMPL and RRT*
To develop the planner I went beyond geometric planners like Dubin's curves and into control-based planning. Along the way, I worked with the Open Motion Planning Library, probabilistic planners like RRT* as well as other planning schemes before focusing on two solutions. One was a unique analytical solution, while the other relied on NLP techniques used for trajectory optimization.
Backman and GPOPS-ii
The first solution to this problem comes from Backman 2015, from this paper I developed a planner in Python. I extended this solution's functionality and improved runtime by tenfold.
The second solution comes from Trajectory Optimization techniques. I used a commercial software called GPOPS to model the problem and solve using direct collocation methods.
Cis-Lunar Explorers

A Mission to The Moon
This was a project that began at Cornell University with the goal of sending a research satellite into lunar orbit through NASA's CubeQuest Challenge. We came in first and second place in ground tournaments and finally secured a place on the final mission. Our success was the result of several innovations:
- Completely Open-Source
- Water Propulsion
- Optical Navigation

My Role
I worked on this team for over two years during my Undergraduate. I was the team lead for ACS. I used a software called System’s Toolkit as well as Python and MATLAB. I led research efforts on many fronts: I modeled the propulsion system, designed the lunar trajectory, optimized fuel usage, determined fuel requirements, and performed statistical analysis.

The water propulsion system and optical navigation were challenges against the goal of generating an orbital trajectory. My final solution relied on a gravitational swing-by with the moon. Once this trajectory was laid out my work turned to optimizing maneuvers, determining margins of error, creating mission plans (like end of life disposal), and building tools to aid in future research.

This project was the first I had completed, and after three years of research, I had learned much: like how to get a foothold on intractable problems, how to carefully document and report my work, and how to successfully work on a large engineering team.
Nursery Automation Project
Description of Project
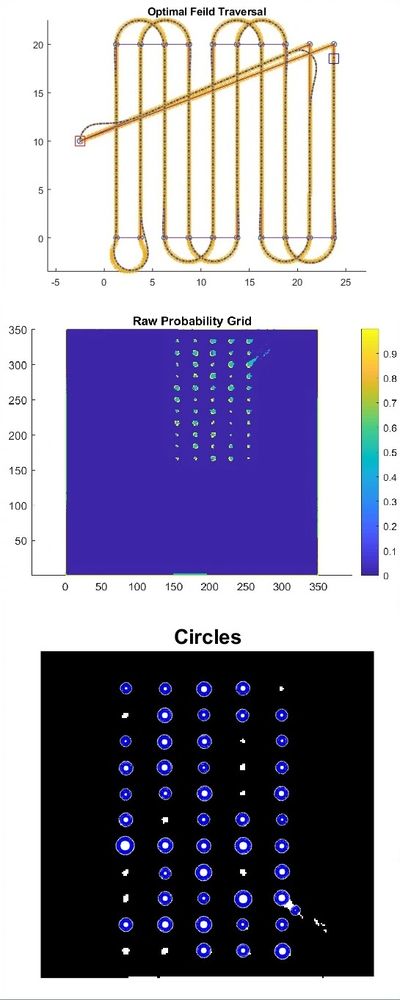
This individual project was completed over the duration of EBS 289K: Sensors and Actuators in Agriculture. The goal of this project was to develop, in simulation, a robot which could efficiently traverse a tree nursery and use a LIDAR data to estimate the trunk sizes.
I began the project by implementing a genetic algorithm to solve the “traveling salesman problem” and find a sequence through a field of rows. Then, I developed an algorithm to create a Dubin's path through that sequence.
In simulation, I used an Extended Kalman Filter to take noisy GPS and odometery data and fuse these sources of information to perform accurate localization of the robot. I developed a simple pure pursuit algorithm to follow the generated path using the localization data.
Using noisy, simulated LIDAR data taken along the path, I created a probability grid representing the occupied locations on a digitized map of the tree nursery.
Finally, using this probability grid and built-in MATLAB computer vision tools, the program outputted a location and diameter of each detected tree in the nursery.
I analyzed this outputted data against the known solution and found that work must be continued to increase the accuracy of the system, but the project was overall very successful. A full report produced by this project can be found in the writing samples page.
ECS 174 - Computer Vision

The Assignment
This course covered several topics in machine vision including linear filters, grouping and fitting, image warping, category recognition, and deep learning. I completed several projects in this course using MATLAB.
See the course description here.
Projects
The course covered three projects. In the first assignment, we used gradient analysis and edge detection algorithms to preform seam carving on a series of images.
We then worked with image stitching to construct panoramic photos. This required identifying local invariant features, computing homography matrices and using image warping algorithms to generate merged images.

Final Assignment
In our final assignment, we used deep learning, and k-means to perform category recognition, and select similar images from the television show "Friends".
The first step was to use a dataset of over 6000 images to generate a "bag of words" using k-means algorithm. We then used SIFT descriptors to find several frames from the data set that best match the query image.
Fiberizer

The Problem
According to a 2009 EPA waste study, the average American throws away 82 pounds of fabric per year and this number is only growing, increasing by 40% between 1999 and 2009.
The runaway issue of textile waste is growing faster than solutions are being developed to deal with it. The Fiberizer Project at Cornell University is tackling this enormous problem.
Our Solution
The Fiberizer is designed to take garments or other fabrics and 'fiberize' them, or make them into fibrous material that can be used in other applications. However, unlike currently available fabric shredders, the fiberizer is able to preserve some the valuable characteristics of the processed fabrics, allowing unprecedented applications of this recycled material.

My Role
As a two-researcher team, we designed a second iteration of the machine with AutoCAD. We conceived and designed many new features. We created a new shredding mechanism contained within a removable cartridge that allowed the user to customize the action of the machine. We then designed system of rollers to deliver the fabric safely from the user to the blades.

Fabrication
I worked independently on all electrical components: I wired and installed the main motor. I designed and installed a stepper motor system, running off an Arduino, to control the system of rollers.
We worked to prepare the machine for exhibition, once for the second life exhibit and again for Cornell alumni and fashion executives. I gave several interviews on my role in the project.
Orchard Platform Automation

Motivation
The agricultural industry is another area facing many challenges under advancing technology: labor and water shortages, new diseases and increasing erratic weather. An industry that spurred many advancements in mechanization and labor-saving tools, it only seems natural that agriculture would be an area of early innovation in the automation revolution.

The Project
The orchard platform is part of ongoing research to create harvest-aid robots. This orchard platform is equipped with a camera that can detect the density of fruit in the upcoming trees. This information can be used to position the moving platforms on the machine and modify the vehicle’s speed. This not only makes for more efficient work, it also makes life easier for the pickers.

My Role
When I joined the project, I was responsible for designing and testing a controller to automate the forward motion of the vehicle.
I designed a drive-by-wire setup that relied on a geared stepper motor to actuate a small pin in the vehicle’s engine. I outlined the specifications for the design: minimum step size, encoder resolution, required torque and angular velocity of the motor. Then
Water Pump Project

The Assignment
The water pump project was the last assignment in MAE 2250: Mechanical Synthesis at Cornell University. The assignment was to design and fabricate a water-pump and eventually compete against the class in a final test to see who could have the most efficient design.
I had specific responsibility over the morph charts and drawing our initial ideas. I performed optimization on the desi

Careful preparation and documentation ensured we had time to prototype and test, this allowed us to re-tool and redesign our pump, giving our team a significant edge over our classmates.
Our team's success was undergirded by our effective planning. Before jumping into design, we carefully considered the customer needs and engineering specifications for the project. We developed a critical path and

Results
On test day we ended up coming in second place of around eight groups.
This project taught me the importance of effective planning. We saw other teams caught in cycles of short-term decision making, while we learned how to be in control of deadlines and ultimately create a winning product.
Open Design

The Assignment
The open design project was one of three large assignments completed for MAE 2250: Mechanical Synthesis at Cornell University. The assignment was to design and develop a unique product using the 3D printer and CNC machine that could be sold on the market for less than $99.
Outline of Roles
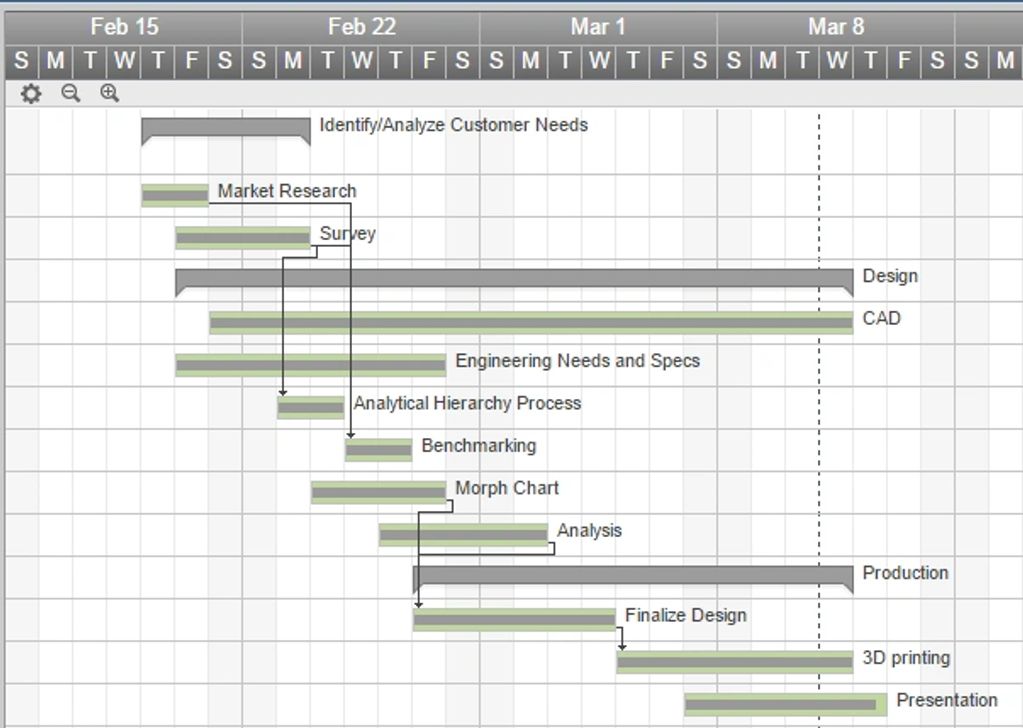
Our team was comprised of four second year students. My specific responsibilities included creating a Gantt chart, project planning, writing reflections, conducting surveys and performing bench-marking tests. All members of the team were involved in the brainstorming, design, prototyping, fabrication and presentation of the product
.png/:/rs=w:1023,cg:true,m)
The Design
The basic design of the Swish Key was modeled after a Swiss Army Knife. The primary mechanisms were the insertion of keys for storage and the release of the keys for use. Using a morph chart we investigated several mechanisms to hold and release the keys, including strip deformation and spring loading. We ultimately decided to use a system of tabs, this proved to be the simplest. Keys co

Analysis
The redesigned key ring met all our goals. Our choice of design meant that the Swish Key was most easily executed using 3D printed SLS nylon or ABS plastic. However, we were worried about long term repetitive stress as well as any extreme loading--like being dropped or sat on--that the plastic might undergo.
We used ANSYS to model the turning of a key and conducted a three-point bending t

Results
Our final product, The Swish Key was a great success, it was new and useful. It had significant advantages over competitors on the market and did not infringe on any patents. See our website for a full sales pitch, and please watch our commercial below.
Scanning Laser Microscope
The Assignment
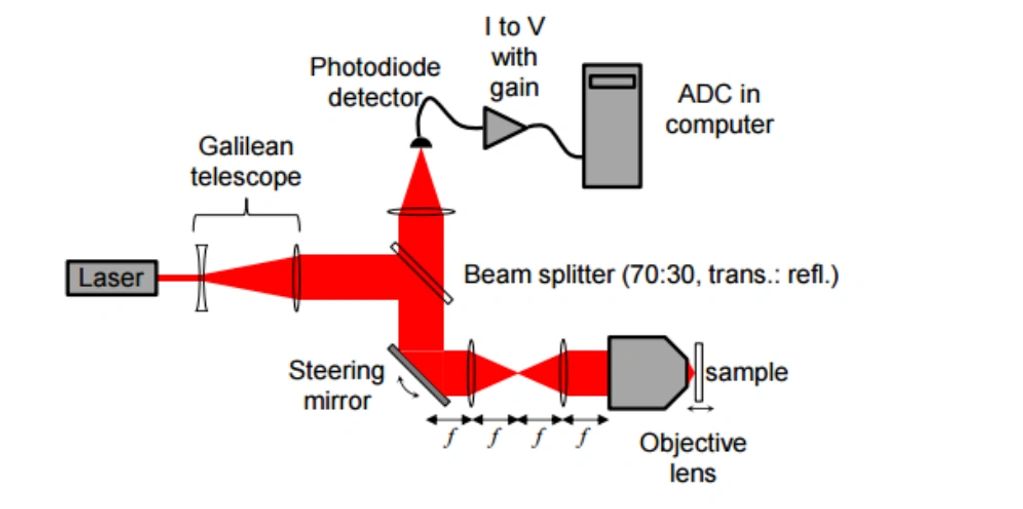
As one of several projects in the course AEP 2640: Digital Age with the Analog World, myself and a team of two other engineers built a Scanning Laser Microscope. The purpose of this project was to become familiar with Physics research tools and digital information technologies in science as well as develop our professional writing and reporting skills

My Role
The design and parts of the SLM were provided to our team and we worked to assemble the device and scan several samples using the graphical programming language LabView.
I worked largely with the circuitry for the SLM, creating a wiring schematic and assembling the electrical system. I was also the primary writer for the project. We all individually developed the code to run the device and
.png/:/rs=w:1023,cg:true,m)
To construct and operate this device required multidisciplinary knowledge: not only did we need understanding of both optical and electromagnetic physics, but also coding theory, signal processing and computer engineering.
This brief but in-depth excursion into these fields of study has continued to serve my professional career by increasing my confidence in and awareness of other engineering fiel